
Prairie View A&M University Roy G. Perry College of Engineering has constructed an autonomous underwater vehicle to be entered in the AUVSI Foundation and ONR's 17th International RoboSub Competition.
An Autonomous Underwater Vehicle (AUV) is a vehicle that is designed to work under water without input from an external user. This type of control means that they are inherently difficult to control with precision. Our objective as a group is to engineer and design the electrical system that will be used for an AUV that will be placed in a competition to complete a series of very specific
tasks.
tasks.
Electrical/Software
One of the most important, if not the most important things that need to be considered for a successful AUV is the software that will be implemented in the electronics. Since the robot is autonomous, it must be able to run a series of tasks on its own and be able to resolve problems
that are encountered without user interference. A couple of key hardware
components that are needed to complete an AUV are the compass, and IMU. For a robot to control itself properly we must program our robots interface to respond to precise inputs from these two devices. Listed below is a few items that will be needed for the hardware:
Inertial Measurement Unit (IMU): MTi from Xsens. For accurate real-time attitude and orientation of the vehicle
Depth: Cerabar T PMP 131 from Endress+Hauser, analog sensor. Used to determine the operation depth of the AUV.
Battery Level: analog sensor. Estimate the status of the battery based on the voltage and current level’s.
Thruster rpm: digital sensor. Provide the revolutions of the main propulsion thruster.
Depth sensor: used to improve the INS.
that are encountered without user interference. A couple of key hardware
components that are needed to complete an AUV are the compass, and IMU. For a robot to control itself properly we must program our robots interface to respond to precise inputs from these two devices. Listed below is a few items that will be needed for the hardware:
Inertial Measurement Unit (IMU): MTi from Xsens. For accurate real-time attitude and orientation of the vehicle
Depth: Cerabar T PMP 131 from Endress+Hauser, analog sensor. Used to determine the operation depth of the AUV.
Battery Level: analog sensor. Estimate the status of the battery based on the voltage and current level’s.
Thruster rpm: digital sensor. Provide the revolutions of the main propulsion thruster.
Depth sensor: used to improve the INS.
Mechanical
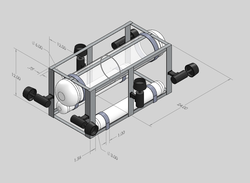
For our RoboSub, we have decided to stick with the traditional "open-hull" design. This will allow us to quickly adjust/repair any electrical or mechanical components within the hull itself. Most of the AUV will be aluminum because it is the lightest and least expensive rigid material to use. The electrical components housing will be made of acrylic tubing as well as PVC tubing for the batteries. It has 6 thrusters; two for forward propulsion, two for sideways propulsion, and two for downward propulsion. Nuts, bolts, and washers will be use to secure all loose components and materials. The AUV weighs about 35 lbs and its dimensions are 24 in x 12 in x 12 in.
Journal Entries
| journal_enty_1.docx |
| journal_enty_2.docx |
| journal_enty_3.docx |
| journal_enty_4.docx |
